Wafer Transfer Robot
This product is a horizontal articulated robot used in clean rooms.
Back and forth (X-axis), swivel (θ-axis), up-and-down (Z-axis) + hand rotation (0 to 180°) operations are possible, supporting wafer transfer in the atmosphere. The drive motor is an AC servomotor with absolute encoder specifications for all axes.
Specifications
| Model | PHT-R-4 |
|---|---|
| Installation environment | Inside the clean room in the atmosphere temperature: 10°C to 35°C humidity: 70% RH or less |
| Arm | Single arm Material: aluminum, CFRP, ceramic |
| Operating range | X-axis: 500mm θ-axis: 340deg Z-axis: 300mm Hand rotation: 0-180° |
| Operating speed (fastest) | X-axis: 500mm/sec θ-axis: 200deg/sec Z-axis: 250mm/sec Hand rotation: 180deg/sec |
| Transportable mass | 3kg (total weight of hand base, hand and workpiece) |
| Robot Type | PHT-R-4-2022 |
|---|---|
| Transported object | ~300mm wafer (We also flexibly customize other special workpieces, shapes, and materials.) |
| Wafer holding method | Vacuum adsorption/edge clamp/edge hold |
| Machine structure type | Horizontal articulated type Cylindrical coordinate system |
| Control axis | 4 axes |
| Control axis | 4 axes |
| Motor type | AC servo motor,Absolute encoder specifications |
| Weight | Body weight: approx. 47kg; Controller: approx. 8kg |
| Control cable | 3m (standard), 5m, 10m |
| Control specification (1) | Parallel interface Input 32 points Output 32 points |
| Control specification (2) | Serial interface RS-232C x 1 line |
| Repeatability | ±0.1mm or less |
| Degree of cleanliness | ISO class 2 (0.1μm or more, 10pieces/m³ or less) |
| Utility | Rated voltage: Single-phase AC200-230V±10% Rated current: 5A Vacuum: -80kPa or less 10NL/min or more |
| Controller specifications | |
| Controller type | MFD |
| Interface | RS232C 1 line Digital IO input: 32 points DC24V 8mA Output: 32 points DC24V±3V 0.1A or less |
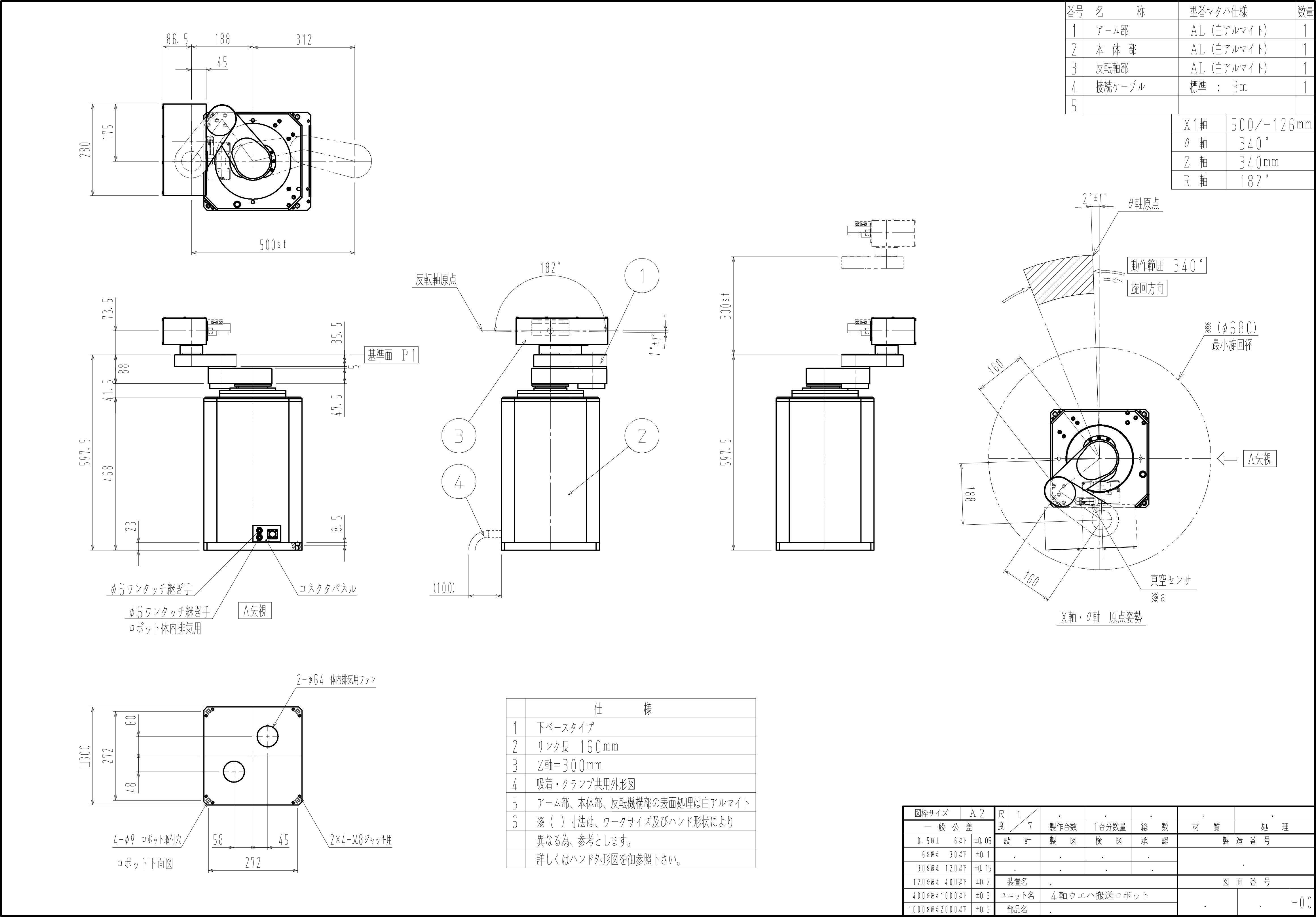
External view (standard specification)