ウエハ搬送ロボット
本製品はクリーンルーム内で使用される水平多関節ロボットです。
前後(X軸)、スイベル(θ軸)、上下(Z軸)+ハンド回転(0~180°)の動作が可能で、大気中でのウエハ搬送に対応します。駆動モーターは全軸アブソリュートエンコーダー仕様のACサーボモーターです。
仕様
| モデル | PHT-R-4 |
|---|---|
| 設置環境 | クリーンルーム内 大気中で 温度:10℃~35℃ 湿度:70%RH以下 |
| 腕 | シングルアーム 素材:アルミ、CFRP、セラミック |
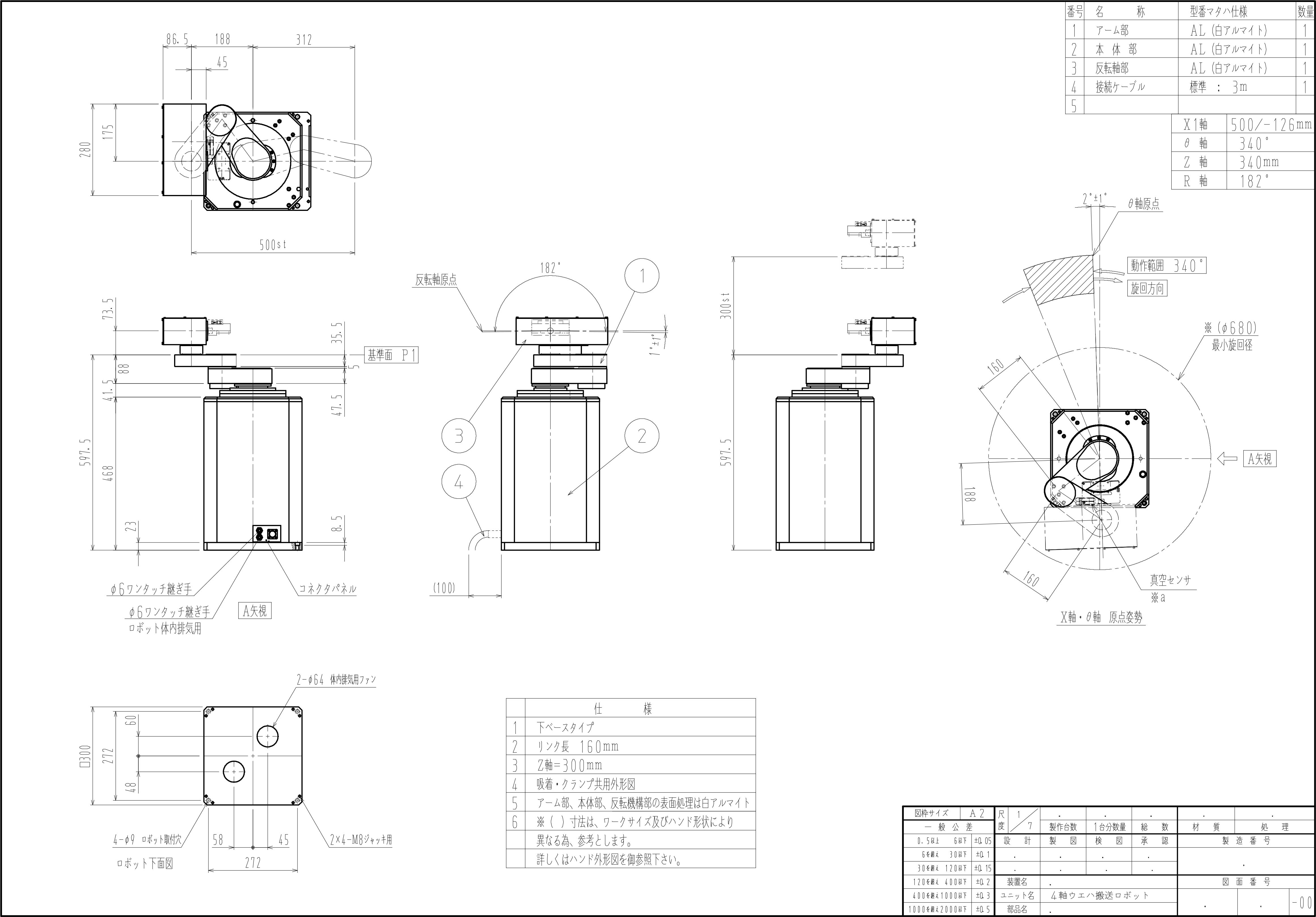
| 動作範囲 | X軸:500mm θ軸:340度 Z軸:300mm 手の回転: 0-180° |
| 動作速度(最速) | X軸:500mm/秒 θ軸:200度/秒 Z軸:250mm/秒 針の回転: 180 度/秒 |
| 可搬質量 | 3kg(ハンドベース、ハンド、ワークの総重量) |
| ロボットタイプ | PHT-R-4-2022 |
|---|---|
| 搬送物 | ~300mmウェーハ (その他、特殊なワーク、形状、材質にも柔軟に対応いたします。) |
| ウェーハの保持方法 | 真空吸着/エッジクランプ/エッジホールド |
| 機械構造タイプ | 水平多関節タイプ 円筒座標系 |
| 制御軸 | 4軸 |
| 制御軸 | 4軸 |
| モーターの種類 | ACサーボモータ、アブソリュートエンコーダ仕様 |
| 重さ | 本体重量:約47kg; コントローラー:約8kg |
| コントロールケーブル | 3m(標準)、5m、10m |
| 制御仕様 (1) | パラレルインターフェース 入力 32点 出力 32点 |
| 制御仕様 (2) | シリアルインターフェース RS-232C×1系統 |
| 再現性 | ±0.1mm以下 |
| 清浄度 | ISOクラス2(0.1μm以上、10個/m³以下) |
| 効用 | 定格電圧:単相AC200~230V±10% 定格電流:5A 真空:-80kPa以下 10NL/min以上 |
| コントローラー仕様 | |
| コントローラの種類 | MFD |
| インターフェース | RS232C 1系統 デジタルIO入力:32点 DC24V 8mA 出力:32点 DC24V±3V 0.1A以下 |
外観図(標準仕様)